|
Преподавание, наука и жизнь. |
| главная | школа | вуз | наука | delphi | программы | походы | автор |
|
||||||||||||||||||||||||||||||
Ручное управление роботом
Как известно, есть два способа управления — непосредственное управление (с пульта) и управление по программе, заранее записанной в память устройства. Этот тренажёр позволяет познакомиться с непосредственным управлением. Можно установить мощности каждого из двух моторов отдельно (или одинаковые мощности для обоих моторов), а затем нажатием на кнопки пульта включать и выключать моторы, перемещая робота.
Управление роботом с датчиком освещённости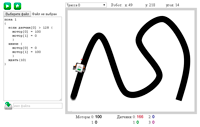
Датчик освещённости позволяет роботу ориентироваться на поверхности стола, например, ехать вдоль границы между белой и чёрной областями (по краю чёрной линии). Фотодиод подсвечивает поверхность, фотоприёмник «ловит» отражённые лучи и измеряет их интенсивность. Наиболее популярная задача этого типа — движение по линии. С помощью тренажёра можно изучить различные законы управления — релейный, пропорциональный, и даже ПИД-управление (пропорционально-интегрально-дифференциальное).
Примеры программ для робота с датчиком освещённости пока 1
{
если датчик[0] > 128 {
мотор[0] = 100
мотор[1] = 0
}
иначе {
мотор[0] = 0
мотор[1] = 100
}
ждать(10)
}
kP = 0.2
пока 1
{
u = kP*(датчик[0]-128)
мотор[0] = 50 + u
мотор[1] = 50 - u
ждать(20)
}
main {
пока 1
{
пока датчик[0] > 128 {
мотор[0] = 100
мотор[1] = 100
ждать(10)
}
назад()
поворот()
}
}
назад {
мотор[0] = -100
мотор[1] = -100
ждать(260)
}
поворот {
мотор[0] = -50
мотор[1] = 50
ждать(50)
}
Управление роботом с двумя датчиками освещённости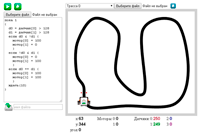
Два датчика освещённости позволяют роботу лучше ориентироваться и ехать вдоль тонкой линии. Они вынесены немного вперед и разведены в стороны. Как и для задач с одним датчиком, c помощью этого тренажёра можно изучать различные законы управления.
Примеры программ для робота с двумя датчиками освещённости пока 1
{
d0 = датчик[0] > 128
d1 = датчик[1] > 128
если d0 & !d1 {
мотор[0] = 100
мотор[1] = 0
}
если !d0 & d1 {
мотор[0] = 0
мотор[1] = 100
}
если d0 == d1 {
мотор[0] = 100
мотор[1] = 100
}
ждать(10)
}
kP = 0.4
пока 1
{
u = kP*(датчик[0] - датчик[1])
мотор[0] = 50 + u
мотор[1] = 50 - u
ждать(10)
}
Управление роботом с тремя датчиками освещённости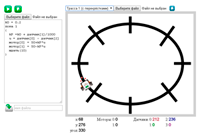
Три датчика освещённости позволяют роботу «смотреть вперёд»: один из датчиков вынесен вперёд по оси робота, поэтому роботу легче обнаружить крутые повороты. Например, можно применить плавающий коэффициент усиления в пропорциональном регуляторе (см. С.А. Филиппов, Робототехника для детей и родителей, СПб: Наука, 2011).
Примеры программ для робота с тремя датчиками освещённости k0 = 0.2
пока 1
{
kP =k0 + датчик[1]/1000
u = датчик[0] - датчик[2]
мотор[0] = 50+kP*u
мотор[1] = 50-kP*u
ждать(10)
}
Управление роботом с четырьмя датчиками освещённости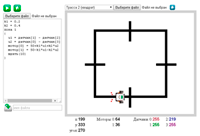
Четыре датчика освещённости позволяют роботу лучше определять крутые повороты. Внутренние датчики служат для тонкой регулировки, для них используется пропорциональное регулирование. Два внешних датчика вынесены немного вперед и разведены в стороны. Они используются тогда, когда встречается крутой поворот. Коэффициент усиления для управления по показаниям датчиков внешней пары выбирается больше, чем для внутренней пары (см. Л.Ю. Овсяницкая и др., Алгоритмы и программы движения робота Lego Mindstorms EV3 по линии, М.: «Перо», 2015).
Примеры программ для робота с четырьмя датчиками освещённости пока 1
{
d0 = датчик[0] > 128
d1 = датчик[1] > 128
d2 = датчик[2] > 128
d3 = датчик[3] > 128
если d1 & !d2 {
мотор[0] = 100
мотор[1] = 0
}
если !d1 & d2 {
мотор[0] = 0
мотор[1] = 100
}
если d1 == d2 {
мотор[0] = 100
мотор[1] = 100
}
если d0 & !d3 {
мотор[0] = 30
мотор[1] = 0
}
если !d0 & d3 {
мотор[0] = 0
мотор[1] = 30
}
ждать(10)
}
k1 = 0.2
k2 = 0.4
пока 1
{
u1 = датчик[1] - датчик[2]
u2 = датчик[0] - датчик[3]
мотор[0] = 50+k1*u1+k2*u2
мотор[1] = 50-k1*u1-k2*u2
ждать(10)
}
Управление роботом с датчиком расстояния (сонаром)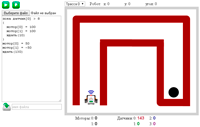
Датчик расстояния (сонар) позволяет во время движения робота определить расстояние до ближайшего препятствия. Он излучает ультразвуковой сигнал и принимает отражённый сигнал. Чем больше время между излучённым и принятым сигналами, тем больше расстояние. Используя датчик расстояния, можно запрограммировать робота так, что он автоматически пройдёт лабиринт известной формы, но неизвестных размеров.
Примеры программ для робота с датчиком расстояния main {
повтори 3 {
отрезок()
}
}
отрезок {
пока датчик[0] > 8
{
мотор[0] = 100
мотор[1] = 100
ждать(10)
}
мотор[0] = 50
мотор[1] = -50
ждать(130)
}
Как загрузить свою трассу для робота?Все тренажёры для работы с LEGO-роботами позволяют загружать свои трассы (поля для робота). Трассы — это растровые рисунки, сделанные в любом графическом редакторе. Они должны отвечать следующим требованиям:
Для загрузки трасс используется кнопка выбора файла и кнопка установки начального положения робота, которые расположены над полем робота: Загрузить трассу можно следующим образом:
Если у вас получились удачные трассы и вы хотите поделиться своими наработками, присылайте их автору по адресу kpolyakov@mail.ru. Их можно будет добавить в стандартный набор трасс, которые загружаются прямо с сайта. Ссылки по школьной робототехнике
| |
|||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||



")



